













机器人底座三维扫描案例
发布时间:2024-04-11
浏览数:582
- A +
- A
- A -
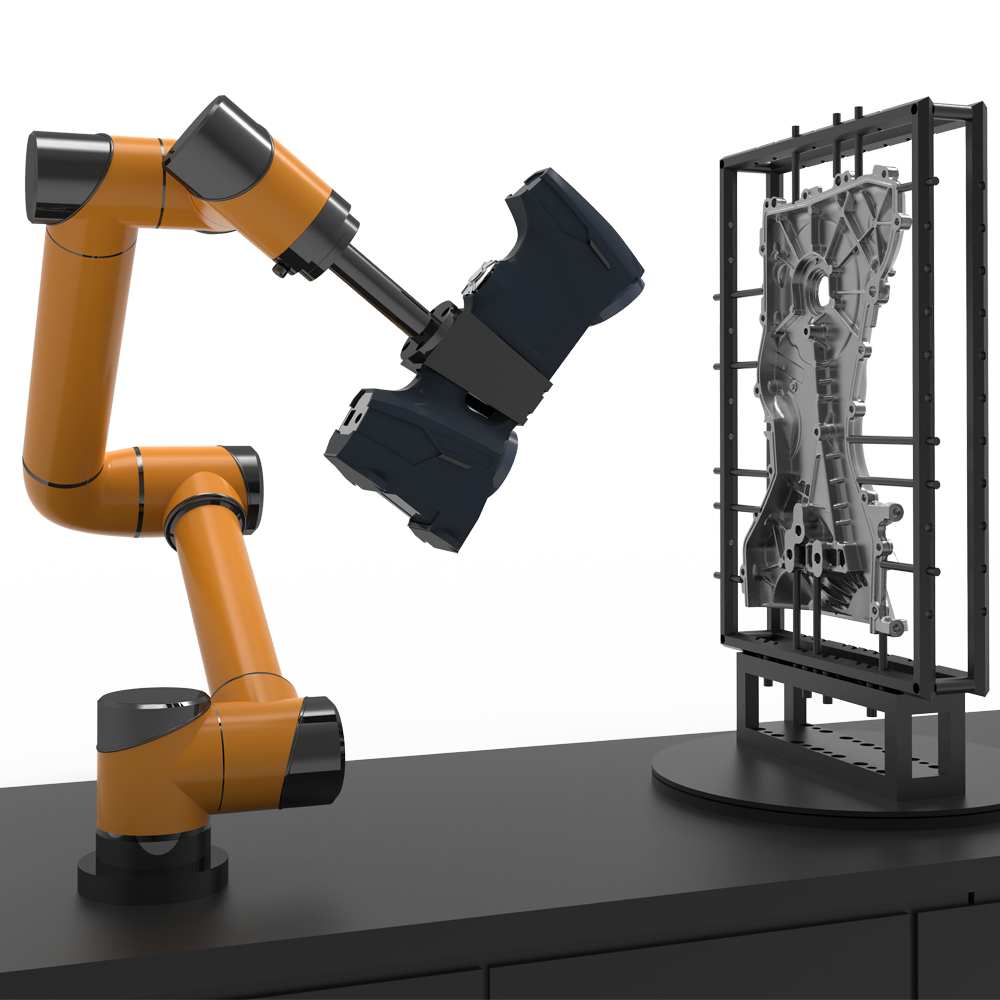
深圳某知名企业需要获取机器人底座外观三维数据,对机器人底座进行保护罩设计,特邀我司技术人员对机器人底座进行三维扫描,取高精度的三维数据,从而对机器人底座保护罩的生产设计提供有效的数据支持。
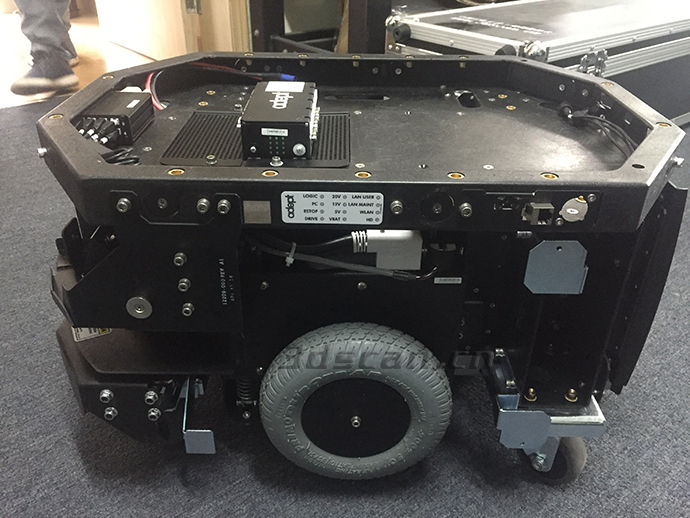
机器人底座实物图
面临问题
机器人底座形状复杂,表面轮廓不一且孔位较多。客户对机器人底座外观数据和孔位要求精度非常高,使用传统的测量方法十分的繁琐、耗时,而且不易对机器人底座整体结构进行准确、快速地测量与检测,孔位及菱角等区域可能导致获取的三维数据量不完整,精度不能达到客户要求。
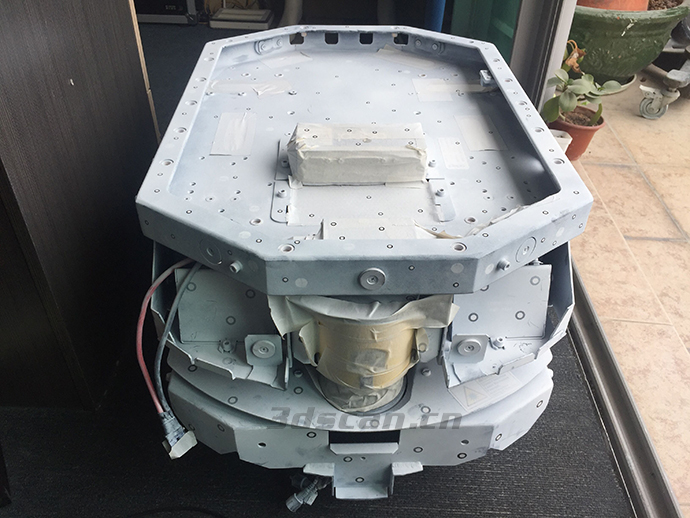
机器人座底实物图
解决方案
由于机器人底座表面轮廓复杂且孔位多等特点,客户对精度要求非常高。华朗三维技术工程师提出解决方案:使用拍照式三维扫描仪HL-3DS+ 快速扫描获取机器人底座三维数据,不仅速度快、操作方便、耗时较短而且数据精度极高,达到客户的扫描需求,成功解决客户所面临的问题。
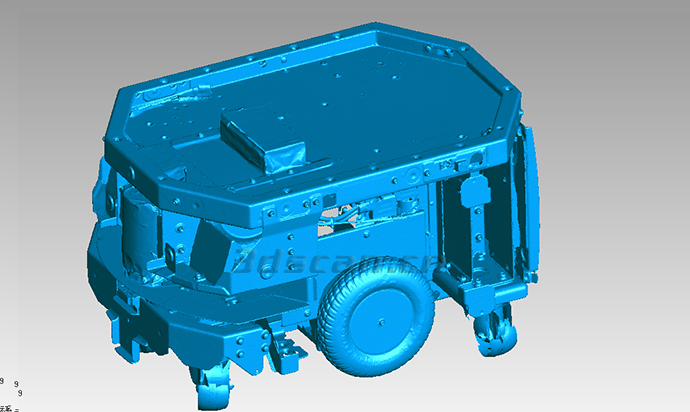
机器人扫描数据图
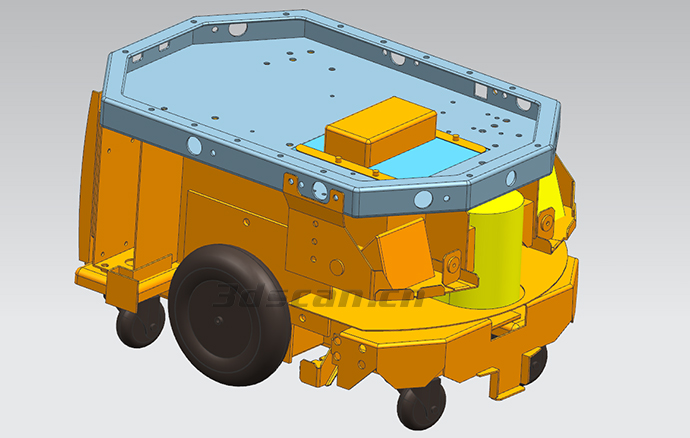
机器人底座数据图
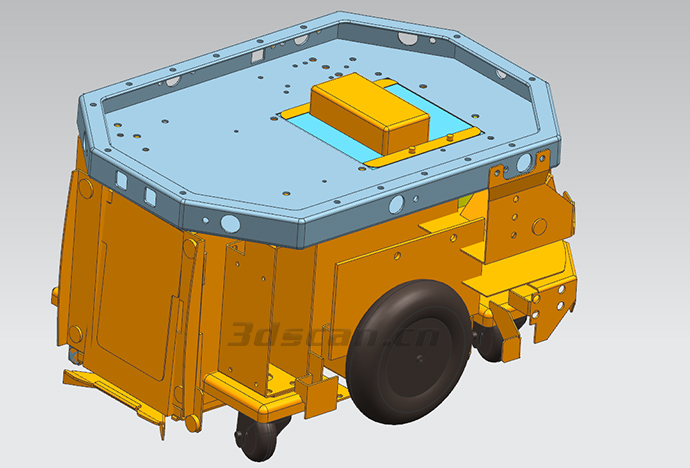
机器人底座数据图
相关产品

HL-3DS+
2024-02-26
拍照式三维扫描仪(HL-3DS+)采用新型编码校定技术,该技术是对三维摄影测量技术的核心掌握与应用,降低物理畸变提高了原始三维数据扫描精度。采用外差法多频相移光栅技术,提高扫描点云质量。真正拥有蓝光装置扫描系统,同时拍照式三维扫描仪扫描数据点间距可达0.01mm,适合精细工件扫描;采用新型核心设计理念,应用碳纤维材料,提高产品工作时的稳定性。

HL-3DP
2024-02-26
三维摄影测量系统(HL-3DP)是以一架手持式的高分辨率(6000×4000)数字相机,对被测物拍摄数字相片,由2D数字相片影像的迭合,来获取被测物的3D坐标。这项移动式的技术在对于撷取被测物的3D坐标、质量控制(Inspection)及变型分析(Deformation)上都能够有效的节省量测时间。

Magicscan
2024-02-26
全国首创,一机多用,同时拥有手持激光扫描操作,拍照式三维扫描仪操作两种功能;既达到了拍照式三维扫描仪的高精度,又兼容了手持式三维扫描仪对工件表面适应性强的特点;同时扫描速度快,解放了人力,提高效率。




