














- A +
- A
- A -
折叠接触式扫描
接触式三维扫描仪通过实际触碰物体表面的方式计算深度,如座标测量机即典型的接触式三维扫描仪。此方法相当精确,常被用于工程制造产业,然而因其在扫描过程中必须接触物体,待测物有遭到探针破坏损毁之可能,因此不适用于高价值对象如古文物、遗迹等的重建作业。
此外,相较于其他方法接触式扫描需要较长的时间,现今最快的座标测量机每秒能完成数百次测量,而光学技术如激光扫描仪运作频率则高达每秒一万至五百万次。非接触主动式扫描主动式扫描是指将额外的能量投射至物体,借由能量的反射来计算三维空间信息。常见的投射能量有一般的可见光、高能光束、超音波与 X 射线。

折叠时差测距
时差测距,或称'飞时测距'的3D激光扫描仪是一种主动式的扫描仪,其使用激光光探测目标物。图中的光达即是一款以时差测距为主要技术的激光测距仪。此激光测距仪确定仪器到目标物表面距离的方式,是测定仪器所发出的激光脉冲往返一趟的时间换算而得。即仪器发射一个激光光脉冲,激光光打到物体表面后反射,再由仪器内的探测器接收信号,并记录时间。
由于光速 为一已知条件,光信号往返一趟的时间即可换算为信号所行走的距离,此距离又为仪器到物体表面距离的两倍,故若令 为光信号往返一趟的时间,则光信号行走的距离等于。显而易见的,时差测距式的3D激光扫描仪,其量测精度受到我们能多准确地量测时间 ,因为大约 3.3 皮秒;微微秒)的时间,光信号就走了 1 公厘。
折叠三角测距
三角测距3D激光扫描仪,也是属于以激光光去侦测环境情的主动式扫描仪。相对于飞时测距法,三角测距法3D激光扫描仪发射一道激光到待测物上,并利用摄影机查找待测物上的激光光点。随着待测物(距离三角测距3D激光扫描仪)距离的不同,激光光点在摄影机画面中的位置亦有所不同。这项技术之所以被称为三角型测距法,是因为激光光点、摄影机,与激光本身构成一个三角形。
激光与摄影机的距离、及激光在三角形中的角度,是我们已知的条件。通过摄影机画面中激光光点的位置,我们可以决定出摄影机位于三角形中的角度。这三项条件可以决定出一个三角形,并可计算出待测物的距离。在很多案例中,人们以一线形激光条纹取代单一激光光点,将激光条纹对待测物作扫描,大幅加速了整个测量的进程。
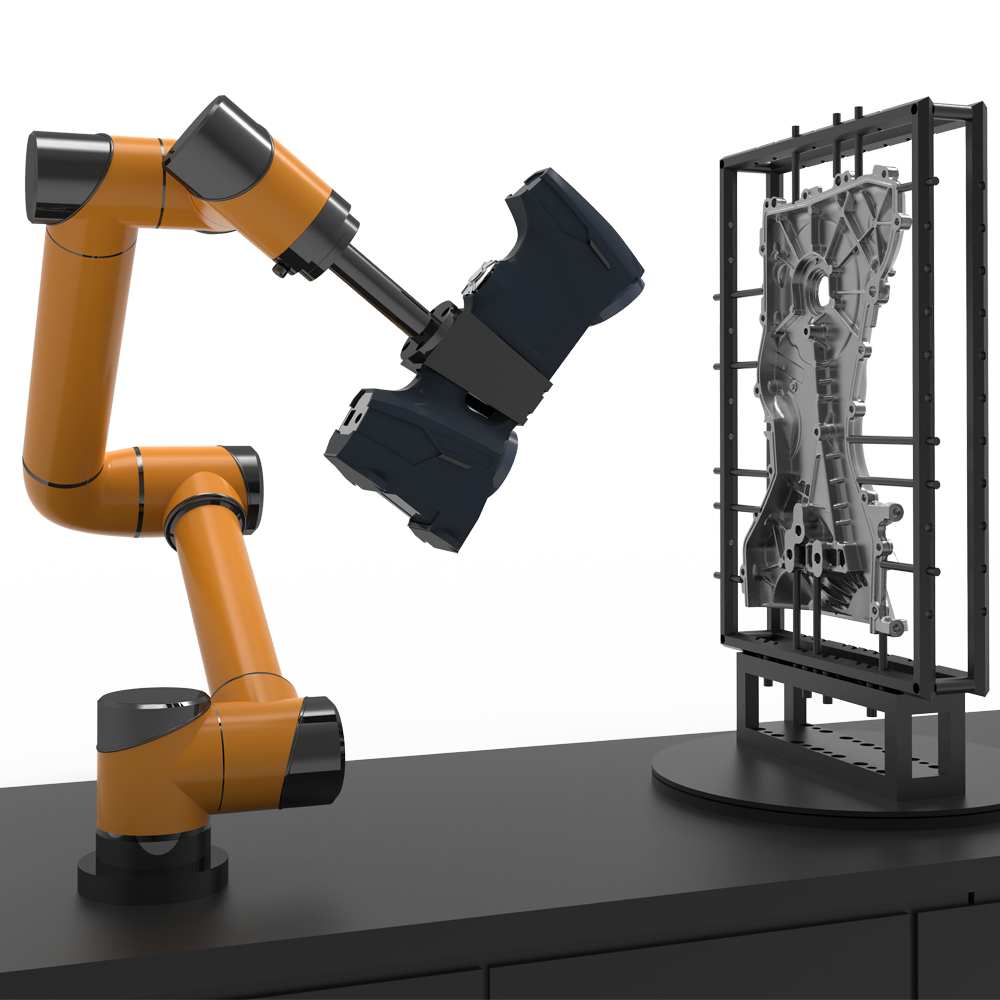
手持激光扫描仪通过上述的三角形测距法建构出3D图形:通过手持式设备,对待测物发射出激光光点或线性激光光。 以两个或两个以上的侦测器(电耦组件 或 位置传感组件)测量待测物的表面到手持激光产品的距离,通常还需要借助特定参考点-通常是具黏性、可反射的贴片-用来当作扫描仪在空间中定位及校准使用。这些扫描仪获得的数据,会被导入电脑中,并由软件转换成3D模型。手持式激光扫描仪,通常还会综合被动式扫描(可见光)获得的数据(如待测物的结构、色彩分布),建构出更完整的待测物3D模型。







